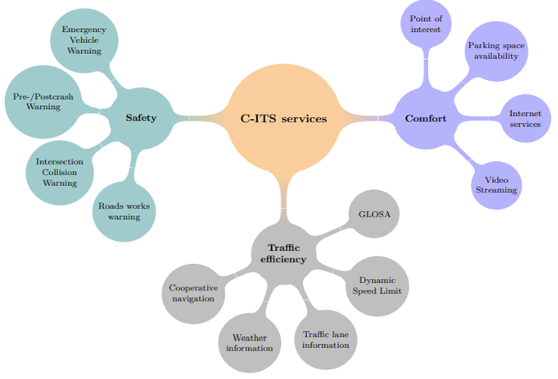
I sistemi di trasporto intelligenti cooperativi (C-ITS) sono un insieme di elementi tecnologici e funzionali che consentono a diversi attori del trasporto (veicoli, dispositivi infrastrutturali, pedoni, ciclisti, ecc.) di coordinare le proprie azioni condividendo informazioni attraverso servizi e dispositivi IoT. Ciò trasforma gli attori del trasporto in agenti intelligenti che richiedono una comunicazione affidabile per migliorare la qualità dell’esperienza di viaggio. L’obiettivo principale di C-ITS è migliorare la sicurezza stradale, ridurre la congestione del traffico, aumentare il comfort di guida e ridurre al minimo le emissioni inquinanti. I servizi C-ITS sono classificati in quattro livelli in base alla loro maturità tecnologica, con i primi due già implementati nei veicoli cooperativi e gli ultimi due ancora in fase di studio.

I servizi C-ITS progettati per i veicoli di emergenza, o che possono essere utilizzati da loro, sono:
- Ottimizzazione del percorso: ottimizzazione del percorso, in base allo stato di congestione della rete, al fine di raggiungere il punto di destinazione nel minor tempo possibile. La procedura di selezione del percorso ottimale può essere effettuata sia durante la fase di pianificazione (scelta preventiva) che durante il viaggio (scelta adattiva, poiché il veicolo adatta il suo percorso alle condizioni di congestione mutevoli della rete);
- Avvicinamento del veicolo di emergenza: ai conducenti viene fornita in anticipo l’informazione sulla presenza di un veicolo di emergenza, al fine di agevolare il suo transito e consentire un arrivo più rapido al sito desiderato;
- Priorità del veicolo di emergenza (EVP): ai conducenti dei veicoli di emergenza in avvicinamento viene garantita la precedenza di passaggio (riduzione della durata del rosso o prolungamento della durata del verde) ai segnali stradali. Inoltre, i conducenti possono anche ricevere un’indicazione del tempo per passare sul verde (o un avviso di velocità per raggiungere il segnale senza fermarsi);
- Prenotazione di corsia: una corsia è riservata ai veicoli di emergenza, liberata dalla presenza di altri veicoli;
- Consiglio di velocità ottimale al semaforo verde (GLOSA): ai veicoli in avvicinamento viene suggerita una velocità da adottare al fine di attraversare l’incrocio, se possibile, senza fermarsi. Ciò riduce il numero di fermate ai semafori rossi, consente un riavvio più rapido quando il semaforo diventa verde e riduce i tempi di percorrenza. Per queste ragioni, il servizio è anche adatto all’uso da parte dei veicoli di emergenza.

Lo studio della frizione pneumatico-strada è cruciale nella progettazione di veicoli stradali sicuri, performanti e manovrabili. La frizione pneumatico-strada è influenzata da diversi fattori, rendendola un concetto complesso e multidimensionale. Tuttavia, la magnitudo della frizione può essere stimata attraverso il coefficiente di frizione o adesione. Il livello di adesione svolge un ruolo cruciale nel garantire la sicurezza stradale, in particolare in condizioni meteorologiche avverse. Questo articolo analizza lo stato dell’arte nei sistemi di monitoraggio della frizione pneumatico-strada, evidenziando gli strumenti utilizzati per la misurazione della frizione e i loro specifici principi di funzionamento. L’articolo esplora anche le tecnologie innovative utilizzate per ottimizzare la sicurezza stradale.
Il testo discute le sfide poste dall’aumento dei veicoli sulle strade, in particolare nelle aree urbane, che hanno portato alla congestione del traffico e ad un aumentato rischio di incidenti e morti. Per affrontare questi problemi, sono stati introdotti sistemi avanzati di assistenza alla guida (ADAS), e in futuro i veicoli diventeranno sempre più automatizzati. Per raggiungere questo obiettivo, i veicoli devono essere in grado di comprendere il loro ambiente circostante e di stimare il proprio stato, che può essere raggiunto in parte attraverso l’uso di sensori a bordo come telecamere, radar e lidar. Tuttavia, i sensori da soli potrebbero non essere sufficienti per prevedere le condizioni ambientali e le singolarità stradali che potrebbero influire sulla sicurezza.
Un’altra sfida è la non linearità dei pneumatici, che può limitare la manovrabilità del veicolo in termini di accelerazioni longitudinali e laterali e ridurre la capacità di guida e di sterzata. Questa limitazione è particolarmente evidente in situazioni di emergenza, come la frenata o la decelerazione improvvisa, che spingono i pneumatici a lavorare in una zona instabile. Pertanto, è essenziale valutare un parametro che consenta la corretta regolazione del movimento del veicolo istante per istante: l’adesione (con la valutazione del coefficiente di frizione).
Il modello TRICK (Tire-Road Interaction Characterization & Knowledge) è proposto come soluzione per stimare il coefficiente di aderenza per ciascun pneumatico, che può essere valutato attraverso dati di sensori come accelerazione, velocità angolare e angolo di sterzata. Il modello TRICK combina due approcci: il modello del veicolo, che valuta lo stato del veicolo in termini di forze e il coefficiente di aderenza effettivo, e il modello basato sulla Formula Magica (MF), che valuta il valore potenziale di attrito attraverso una procedura di scivolamento. La metodologia, implementabile a bordo delle Centraline Elettroniche (ECU) del veicolo, mostra come le informazioni sul coefficiente di aderenza potenziale possano essere adottate nei sistemi di guida autonoma, consentendo l’ottimizzazione e la massimizzazione delle prestazioni, riducendo drasticamente il numero e la gravità delle collisioni.
Infine, il testo discute le due principali approcci per la stima dell’attrito: i metodi sperimentali e gli approcci basati su modelli. I metodi sperimentali utilizzano sensori aggiuntivi come sensori ottici o acustici e telecamere per valutare l’attrito poiché l’asfalto bagnato è più scuro e trasparente dell’asfalto asciutto. Gli svantaggi di questo metodo sono l’alta frequenza di questi sensori, che possono diventare sporchi e distorcere i risultati. Gli approcci basati su modelli, come TRICK, utilizzano modelli matematici per stimare l’attrito e possono essere implementati a bordo delle Centraline Elettroniche (ECU) del veicolo.
